



VegNET Tasmania: Growing regeneratively kicks off in Tasmania
18 May 2026Summary of Resources for Onions and other Alliums
23 June 2026
Reading Time: 5 minutes
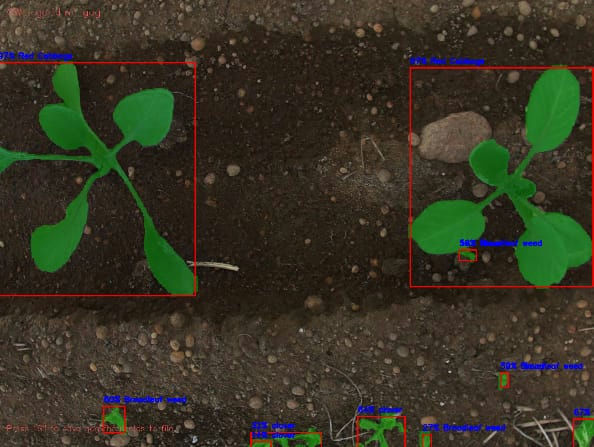
OWL AI weed detection visual
The development of the Open Weed Locator (OWL) project represents a shift toward more accessible, practical, and grower-driven precision agriculture technologies.
Supported through the VegNET Innovation Fund and VegNET WA grower-led AgTech study tour to Europe, the project has drawn on global insights into automation, robotics and open-source innovation. The study tour, delivered in collaboration with the Warren Cauliflower Group and Manjimup Pastures Group, provided Western Australian growers with exposure to leading agricultural technologies in Copenhagen and the Netherlands, helping inform the ongoing development and regional adaptation of OWL.
At its core, the OWL system is a low-cost, open-source weed detection technology designed by Dr Guy Coleman to enable targeted herbicide application. Using cameras, machine vision and artificial intelligence, the system detects weeds in real time and activates spray nozzles only where weeds are present. This contrasts with traditional blanket spraying methods and offers the potential to significantly reduce chemical use while maintaining effective weed control.
“I was driven to develop something that was low-cost and practical, because the existing technology was incredibly expensive – even though the hardware itself only costs a few hundred dollars. OWL was about creating a tool that people could actually access and use.” Dr Guy Coleman said.
While the study tour provided valuable international context, the OWL demonstration day in WA was a key moment in translating these insights into practical, on-farm application. The event brought together growers, researchers and industry stakeholders to see the OWL prototype operating in a real horticultural setting, bridging the gap between concept and implementation.
A grower-led solution
The OWL project has been driven by growers seeking practical alternatives to both rising input costs and the loss of key herbicide options. As highlighted by growers involved in the project, increasing concern around chemical availability and long-term sustainability prompted exploration of new approaches to weed management.
However, many existing robotic or precision weed control technologies remain financially out of reach for small to medium-sized farming operations. Commercial systems can cost hundreds of thousands of dollars, often accompanied by ongoing subscription or support fees. In contrast, OWL provides a more accessible option, with individual camera units costing a fraction of that investment.
“For a small family farm like ours, a lot of the commercial robotic weeding technology just isn’t affordable. That’s what led us to explore open-source options like OWL – something we could actually build, adapt, and use ourselves.” Jake Ryan said.
This affordability, combined with its open-source design, allows growers to take a more active role in developing and adapting the technology to suit their own farming systems.

Group Study Tour
From concept to field application
The demonstration day showcased how the OWL system can be implemented using relatively simple and affordable hardware. Built around a Raspberry Pi computer, camera, and relay control system, the prototype illustrated how machine learning models can be integrated into farm operations without reliance on high-cost proprietary equipment.
During the demonstration, the system was configured to detect weeds within a vegetable cropping system and activate precision spray outputs. Attendees observed how weeds could be identified in real time, triggering individual nozzles to apply herbicide only where required.
Importantly, the demonstration also explored different operating modes, including ‘green-on-brown’ detection in fallow conditions and the more advanced ‘green-on-green’ capability. The latter represents a major step forward, enabling weeds to be identified within actively growing crops – an essential requirement for vegetable production systems.

Dr Guy Coleman presenting at the OWL demonstration day
The role of data in driving performance
A central theme of the demonstration was the importance of data in developing effective AI-driven weed detection systems. Machine learning models rely on large volumes of annotated images to distinguish between crops and weeds under varying conditions.
Initial work on the OWL vegetable system has already resulted in the collection of several thousand images, but it was acknowledged that significantly larger datasets will be required to achieve high levels of accuracy and reliability. This presents both a challenge and an opportunity. Growers can play a direct role in improving the system by contributing images from their own farms, even during routine activities like spraying.
Open-source innovation in practice
One of the defining features of the OWL project is its open-source approach. Rather than relying on proprietary systems, all designs, software and documentation are openly available, allowing growers to build, modify and improve the technology themselves.
This model encourages collaboration and innovation, both locally and internationally. Through the study tour and broader OWL network, growers and researchers are sharing data, ideas and solutions across regions and countries. It is not uncommon for growers in WA to engage with researchers in Europe or other parts of the world, contributing to a shared pool of knowledge.
The open-source model also reduces barriers to entry, particularly for smaller operations. While it requires a more hands-on approach compared to commercial ‘plug-and-play’ systems, it provides flexibility and control, allowing growers to tailor solutions to their specific needs.
Extending knowledge across the industry
The OWL demonstration day was not just about showcasing technology – it was also about sharing knowledge. As part of the VegNET WA extension program, the event ensured that insights gained through the study tour and project development could be shared with a broader audience.
Field days, demonstrations and supporting resources help extend the reach of the project beyond those who were directly involved.
This ensures that growers across Australia, including those unable to attend events in person, can still access and benefit from the knowledge generated.
Looking ahead
The demonstration highlighted both the potential and the ongoing development needs of the OWL system. Future work will hopefully focus on expanding the open-source weed image library, improving detection accuracy and testing the system across a wider range of crops and regions.
There is also significant opportunity to scale the project across different horticultural industries, from brassicas to leafy greens and beyond. As datasets grow and technology improves, the system’s applications will continue to expand.
Ultimately, the OWL project demonstrates that precision agriculture does not have to be limited to high-cost commercial systems. Through collaboration, open-source development, and grower-led innovation, practical and affordable solutions can be developed to address real challenges in modern farming.